“26年具身智能,做不过来,根本做不过来”:含陶大程教授独家专访 l 深度产业观察
“26年具身智能,做不过来,根本做不过来”:含陶大程教授独家专访 l 深度产业观察2026年具身智能这么热, 美国旧金山PI Robotics这家机器人创业公司, 你真得知道。
来自主题: AI资讯
6084 点击 2026-04-14 08:40
 搜索
搜索
2026年具身智能这么热, 美国旧金山PI Robotics这家机器人创业公司, 你真得知道。
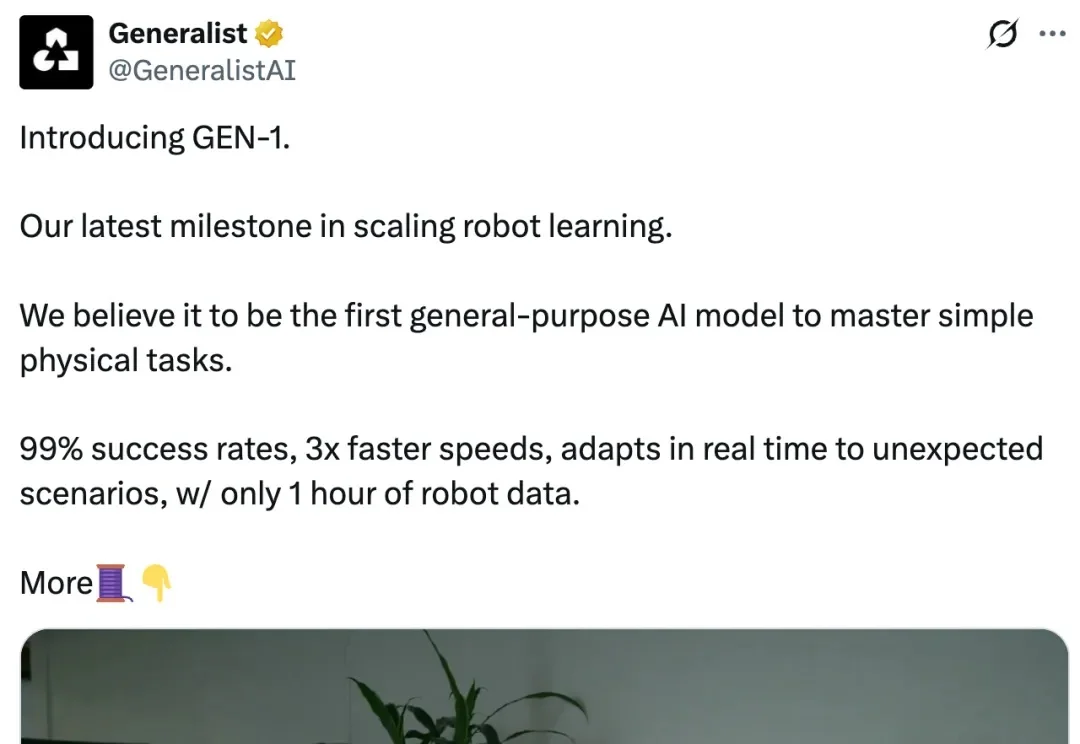
这个月,具身智能领域又卷出新高度:硅谷独角兽公司 Generalist AI 发布全新一代基础模型 GEN-1,将机器人包装手机、折纸箱这些活的平均成功率直接拉到了创纪录的 99%,折纸箱的速度更是飙到了以前的三倍(34s vs 12.1s)。
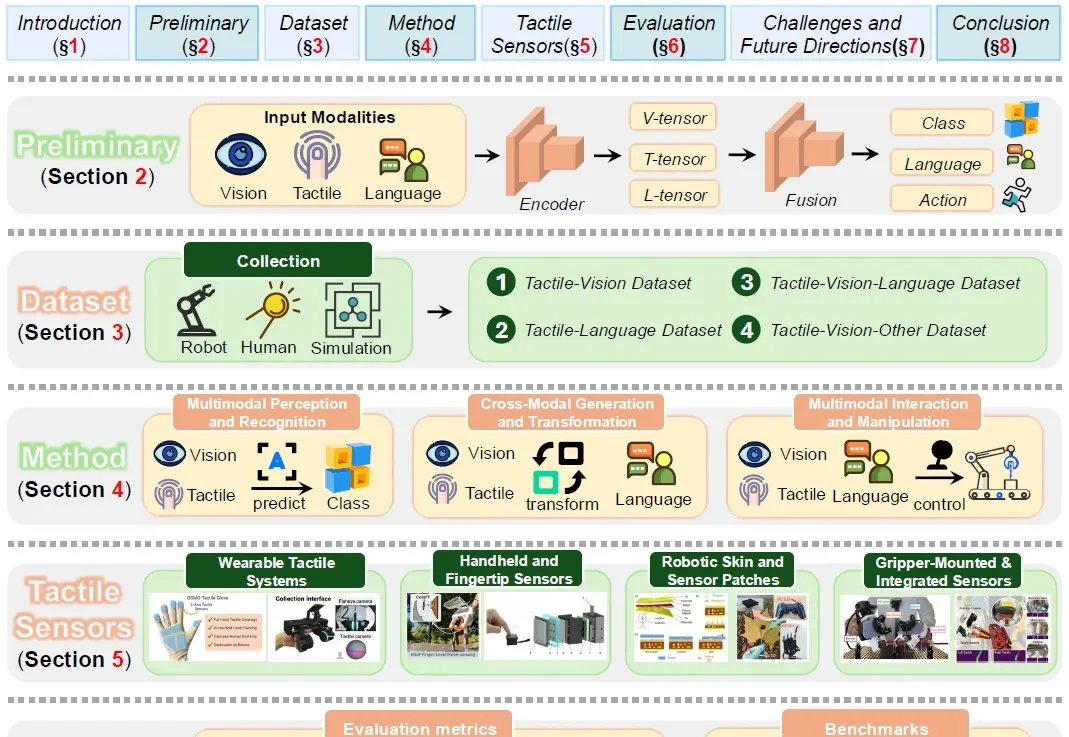
在具身智能的感知拼图中,触觉一直扮演着不可或缺却难以被完美量化的角色。它提供了视觉等远程传感器无法替代的关于接触几何、材料特性和交互动态的直接反馈。
Harness(驾驭)的风,终究还是从大模型,吹到了机器人!

想象一下这样的生活片段:你拿起手机 30 秒,屏幕立刻跳出提醒,“当前心率 78,压力中等,建议深呼吸”;家里的智能摄像头静静看着午睡的宝宝,突然通过 App 提醒你:“宝宝心率偏快,呼吸略显急促,建议进屋查看”;养老院里,巡检机器人通过一次擦身而过的对视,便能感知到老人今天情绪低落,且血氧饱和度略低于往常......
人形机器人在春晚舞台上大放异彩!然而,人们在看惯了机器人跳舞、后空翻,乃至武术表演之后,不禁开始思考:机器人何时才能真正走进大众生活,解决日常生活中的琐碎任务,从而解放人类的双手?
小时候看《冰雪奇缘》,相信有不少小孩问过父母:雪宝是真的吗?

春节前,千寻完成近 20 亿元人民币两轮融资,估值突破 100 亿元,新股东包括云锋基金、混沌投资、红杉中国等财务机构,Synstellation Capital、TCL 创投、明荟投资(汇川技术董事长家办)等产投方,重庆产业投资母基金、杭州金投等国资;顺为、Prosperity7、达晨财智等老股东也继续投资。

2026年的除夕夜,AI技术第一次以如此密集的方式进入全民文化场景。很多观众或许说不清技术原理,但一定记住了那几个关键词:AI、机器人、具身智能。然而,对于身处其中的科技大厂和独角兽们来说,焦虑并没有随着《难忘今宵》的响起而消散。
从灵巧手开始「制造时间」:揭秘 Sharpa 的通用人工智能之路 作者|Li Yuan 编辑|郑玄 今年的春晚,已经变成机器人大战了。 在热闹之下,笔者关注到了一个很有趣的细节,相比于去年的机器人,今