
我用全网爆火的 Remotion Skill 全面复刻了 「小 Lin 说」的特效,它能做成什么样?|附带保姆级教程
我用全网爆火的 Remotion Skill 全面复刻了 「小 Lin 说」的特效,它能做成什么样?|附带保姆级教程前两天晚上,我又刷到了小 Lin 说的视频。
来自主题: AI技术研报
6767 点击 2026-04-14 15:48
 搜索
搜索
前两天晚上,我又刷到了小 Lin 说的视频。
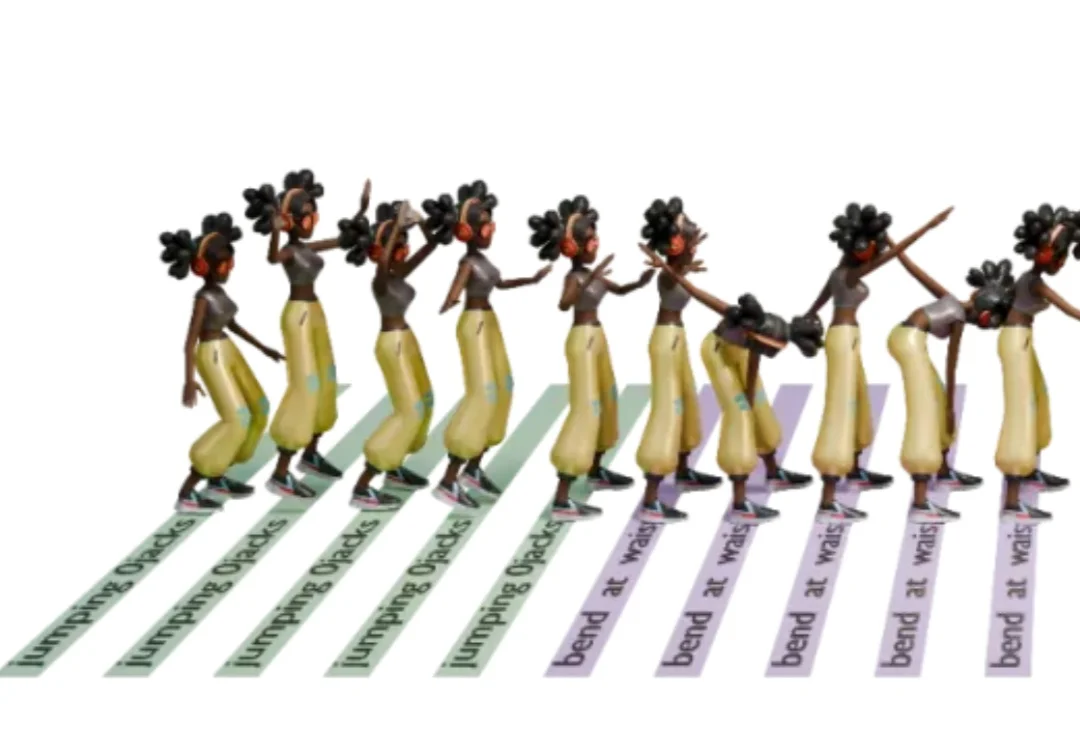
文本驱动的人体动作生成是游戏NPC、虚拟主播、机器人控制等实时交互系统的核心技术。
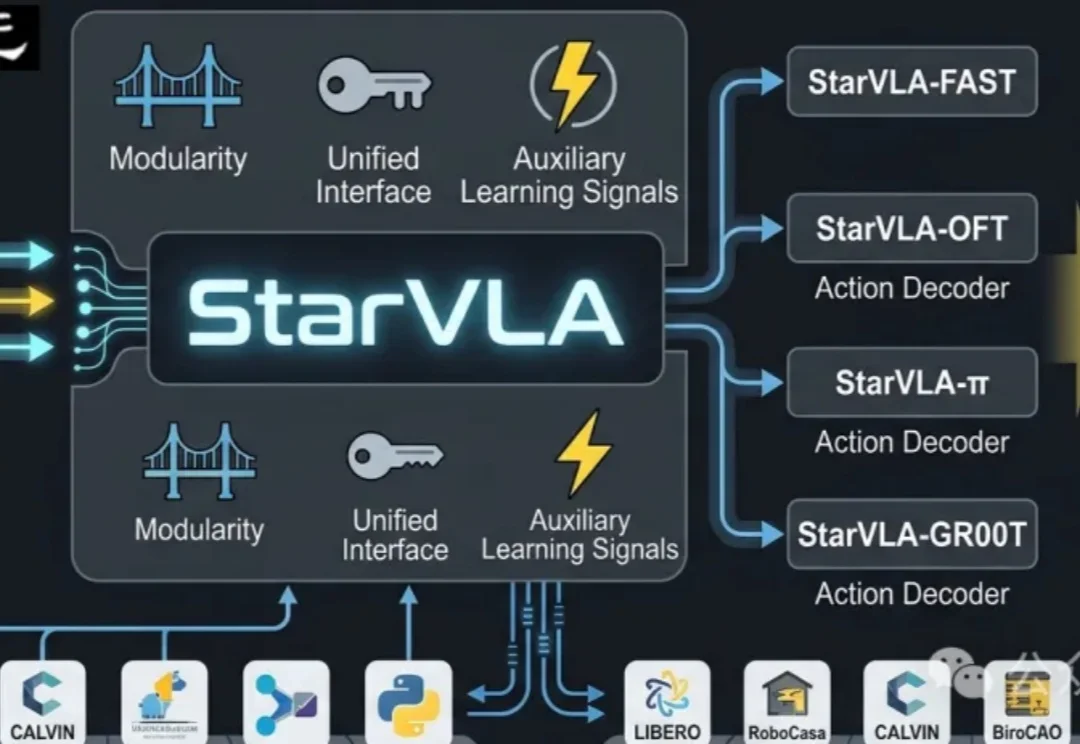
当前具身智能的VLA(Vision-Language-Action)赛道正陷入典型的「碎片化」泥潭:不同团队采用异构的动作解码范式、强耦合的数据管线、互不兼容的评测协议,导致方法难以横向对比,复现成本极高。
浙江大学联合美团龙猫团队、清华大学推出全新研究成果——SKILL0,并提出技能内化(Skill Internalization)——小模型真正需要的,或许不是推理时的“外挂技能”,而是将技能内化为本能。

模思智能成立于2024年,位于上海徐汇区,由上海创智学院与复旦大学联合孵化,是国内少数完成“全模态基座模型能力闭环”的初创公司之一,致力于构建统一Token表达框架下的“情境智能”能力,推动Agent系统在真实世界中的自主交互与任务执行。

近日,上海人工智能实验室联合南京大学、香港中文大学及上海交通大学,将OpenClaw的成功应用于多模态生成领域。他们提出GEMS(Agent-Native Multimodal Generation with Memory and Skills),激发小模型潜力,甚至让6B小模型在部分任务超越了Nano Banana 2。
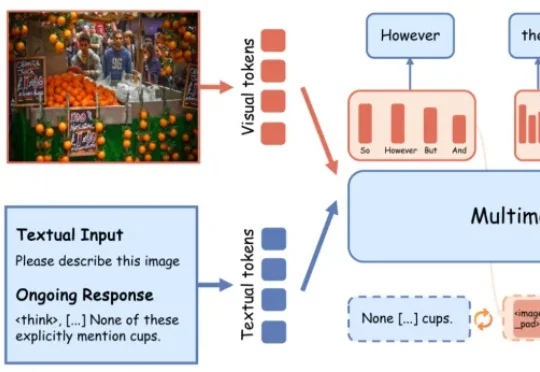
多模态大推理模型的幻觉,很多时候并非「没看见」,而是在最不确定的推理阶段想偏了。最新研究发现,模型在生成because、however、wait等transition words时,往往处于高熵关键节点,更容易脱离图像证据、转向语言脑补。LEAD在高熵阶段不急于输出单一离散token,而是先在潜在语义空间保留多种候选推理方向,并通过视觉锚点持续拉回图像证据,显著缓解幻觉。
最近,计算机视觉领域的顶级会议 CVPR 2026 的 NTIRE 鲁棒性 AIGC 图像检测挑战赛( Robust AI-Generated Image Detection in the Wild Challenge )结果出炉。蚂蚁集团 AI 安全实验室的队伍 MICV 凭借在鲁棒性测试样本上 ROC AUC 达到了惊人的 0.9723,成功摘得「复杂真实场景鲁棒性样本测试」挑战赛的冠军。
最近,来自Meta与University of Copenhagen的研究者提出了OneStory: Coherent Multi-Shot Video Generation with Adaptive Memory(收录于CVPR 2026)。这项工作聚焦于一个核心问题:如何在生成多镜头视频时,有效保留长程跨镜头上下文,从而实现更强的叙事一致性。
多 Agents 协同方案成了现在 AI 圈的主流玩法,以前是一个 Agent 能搞定一个人要做的事,现在是多个 Agent 完成一个团队要做的事。