
我把昨晚的梦输入AI,它居然直接把我拉进去玩儿了一把?!
我把昨晚的梦输入AI,它居然直接把我拉进去玩儿了一把?!属实给我整精神了,AI啥时候会干的这事??不卖关子了,这是HappyOyster 1.0(快乐生蚝)实现的,阿里ATH推出的可实时构建和交互的开放式世界模型产品。看到世界模型四个字,可能有朋友好奇:这和我之前玩的Sora那些有啥区别?不都是AI生成画面嘛?
来自主题: AI资讯
8574 点击 2026-06-20 10:25
 搜索
搜索
属实给我整精神了,AI啥时候会干的这事??不卖关子了,这是HappyOyster 1.0(快乐生蚝)实现的,阿里ATH推出的可实时构建和交互的开放式世界模型产品。看到世界模型四个字,可能有朋友好奇:这和我之前玩的Sora那些有啥区别?不都是AI生成画面嘛?

据英国《金融时报》昨日报道,美国AI独角兽、世界模型创企Odyssey获得3.1亿美元(约合人民币20.96亿元)融资,本轮融资落地后,该公司投后估值将达14.5亿美元(约合人民币98.05亿元)。

投中网独家获悉,专注于因果世界模型(Causal World Model)的人工智能公司Aether AI 正式宣布完成首轮融资,募集资金总额约2000万美元。该轮融资由经纬创投领投,英诺基金、SWC Global、九合创投等机构联合参投。

刚刚过去的2026智源大会上,由智源研究院孵化的星源智发布了全球首个具身交互世界模型ω-EVA,就这一前沿命题给出了全新的差异化解法。传统世界模型的困境是"只预测,不参与"。它们训练时学习未来状态,推理时却与动作生成分割——视频生成得再精美,机器人该撞墙还是撞墙。

物理AI基础设施公司章鱼动力(SynapX)近日已完成新一轮5000万美元融资。结合此前两轮5000万美元的连续融资,章鱼动力在过去3个月内已累计完成接近10亿元人民币的融资。

被算力荒逼出来的硬核奇迹!腾讯米哈游老兵组成的「草根」团队,硬在国产芯片上炼出了超10分钟的绝对物理一致性。画面可以糙,物理绝不能假,这就是通往AGI的真正基石。
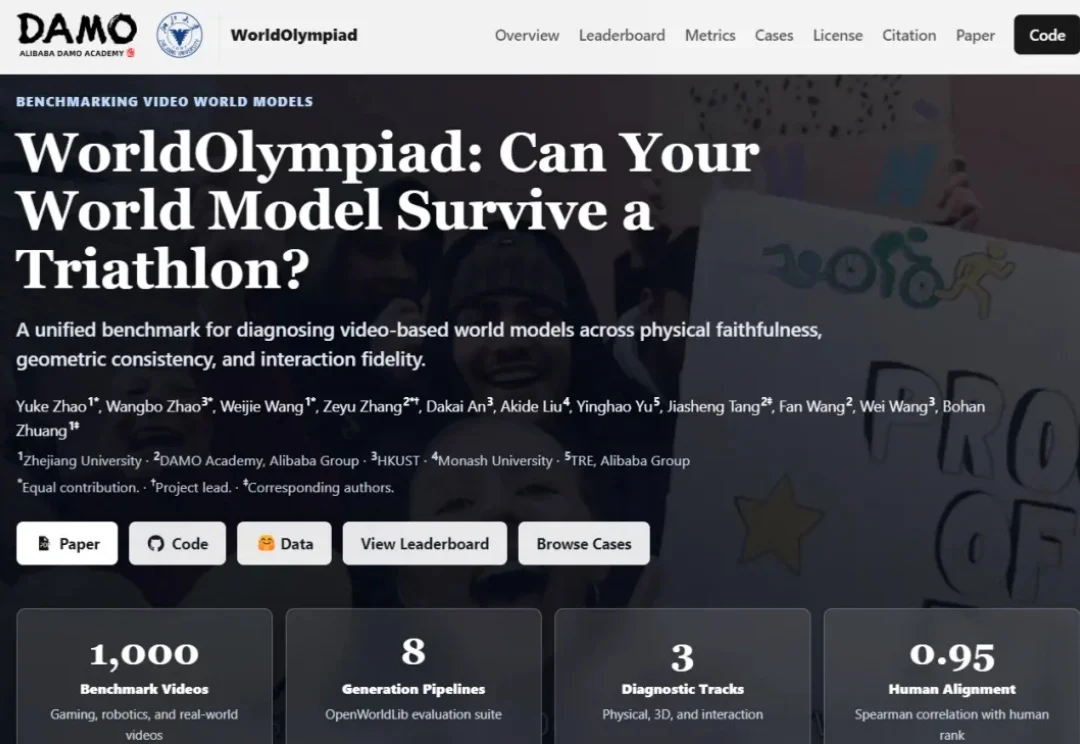
达摩院联合高校推出WorldOlympiad评测基准,跳出传统视频“唯画质”的评价逻辑,以物理真实性、三维几何一致性、长时序交互保真度三大维度,搭配游戏、机器人、通用实景三大场景,打造一套全方位的视频世界模型评测体系。
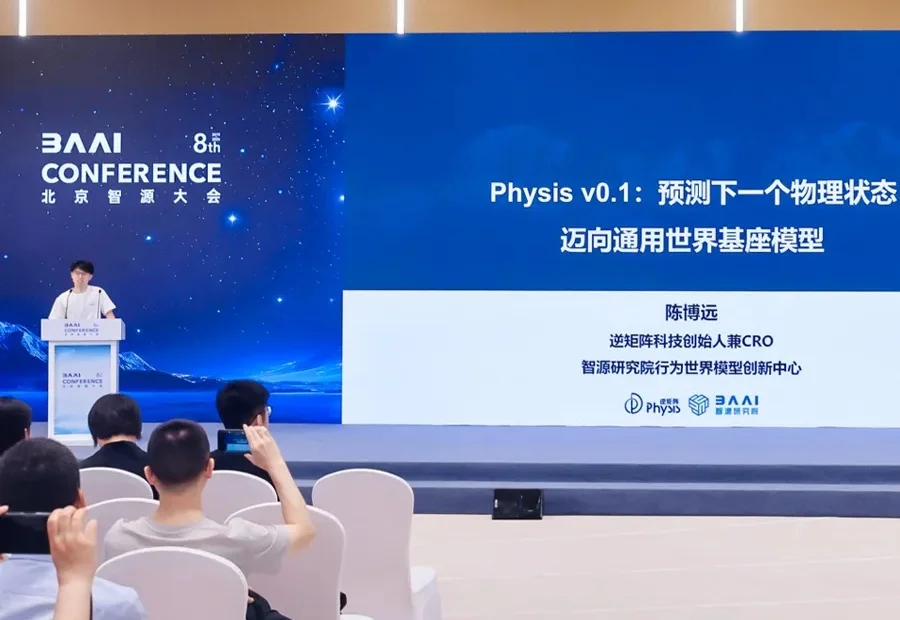
逆矩阵计划于 2026 年底发布旗舰模型。

刚刚,大晓机器人半年融资数亿美元,开悟世界模型同时刷新四大权威榜单第一,4B参数硬刚28B大模型!具身智能的「ChatGPT时刻」真的要来了?
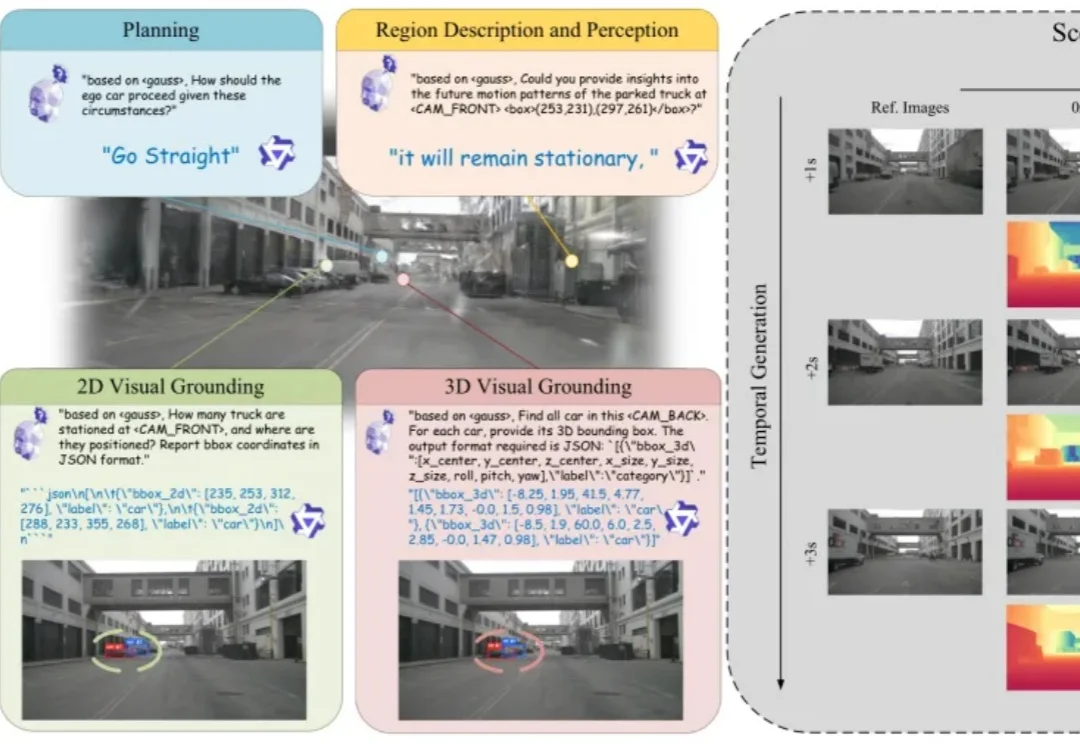
自动驾驶世界模型的研究目标已经从单纯预测未来视觉帧,扩展到构建可用于场景理解、空间定位和后续决策的世界表示。如果模型只能生成外观上合理的未来图像,却无法回答场景中有哪些目标、目标位于何处,以及不同视角下的空间结构如何变化,那么它仍然缺少对三维驾驶环境的显式建模能力。