
用AI来算八字,还要卖给外国人,这行吗?
用AI来算八字,还要卖给外国人,这行吗?当ChatGPT等大模型出现,开始扮演起“占卜师”“命理师”的角色,可以随时随地回应,不限次、不限时地帮人答疑解惑,占卜、算命快速成为年轻人使用AI的高频场景之一。
来自主题: AI资讯
10289 点击 2025-01-14 10:03
 搜索
搜索
当ChatGPT等大模型出现,开始扮演起“占卜师”“命理师”的角色,可以随时随地回应,不限次、不限时地帮人答疑解惑,占卜、算命快速成为年轻人使用AI的高频场景之一。

当电影《泰迪熊》成为现实,一只只会说话、能互动,甚至可以感知主人情绪的毛绒玩具,正在逐渐取代传统玩具,成为大人和小孩的新宠。

2024年,清智资本创始合伙人张煜一共看了近1000份AI领域的商业计划书,共投资了近10个AI项目,比2023年少一些。即便如此,他仍是2024年出手较多的投资人之一。
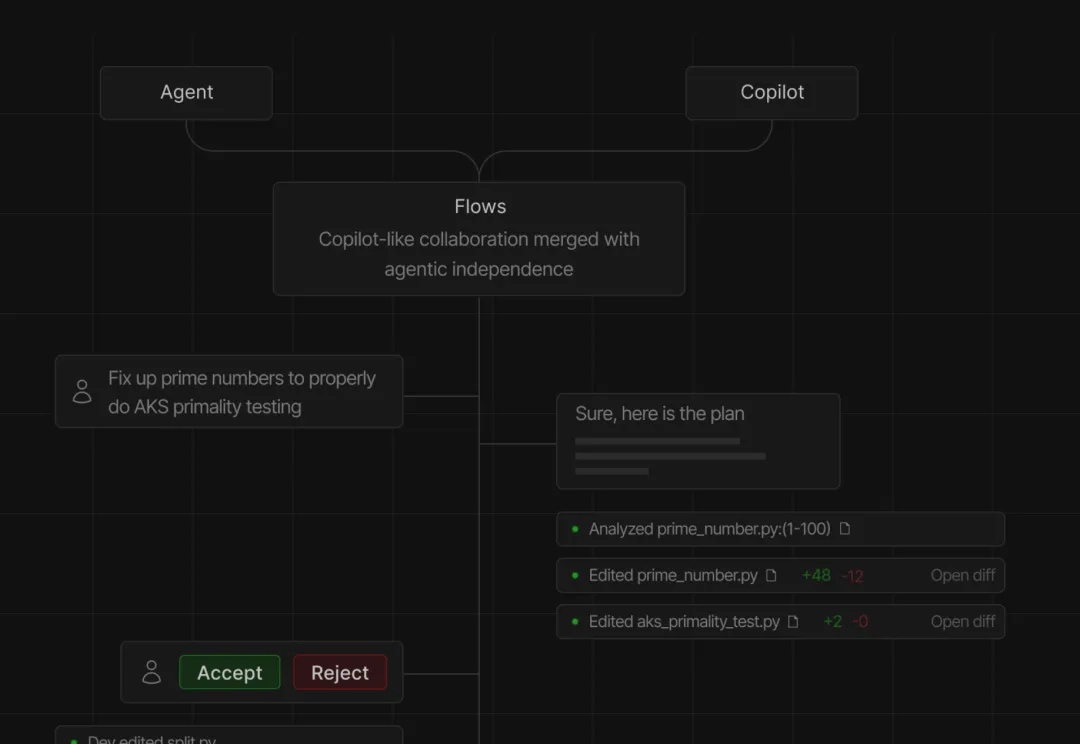
最近需要整理一些 AI IDE 的资料,读了好几篇海外独角兽的文章,对 cursor 的访谈那篇印象深刻,但我个人更喜欢用 windsurf,作为对比,我找来了 windsurf 的访谈,时间是2024 年 12 月 14 日,正好满一个月,希望对大家有用!

一场专门针对年轻女性的“虚拟围猎”。 前段时间,“哈圈”和“乙游”发生了一场网络大战。

一句话总结2024年大模型的商业化进展,或许是冰火两重天。一方面,我们看到了许多成功的AI付费用例,小到9.9一套的AIGC宠物写真,200美元的ChatGPT Pro月费,大到百万一台的大模型一体机,C端/B端市场行情看起来一片火热。

离不开AI的时代,人变了吗? 在ChatGPT和生成式AI席卷全球的时代,大学生已成为这一技术浪潮中的“深度使用者”。AI时代,人变了吗?
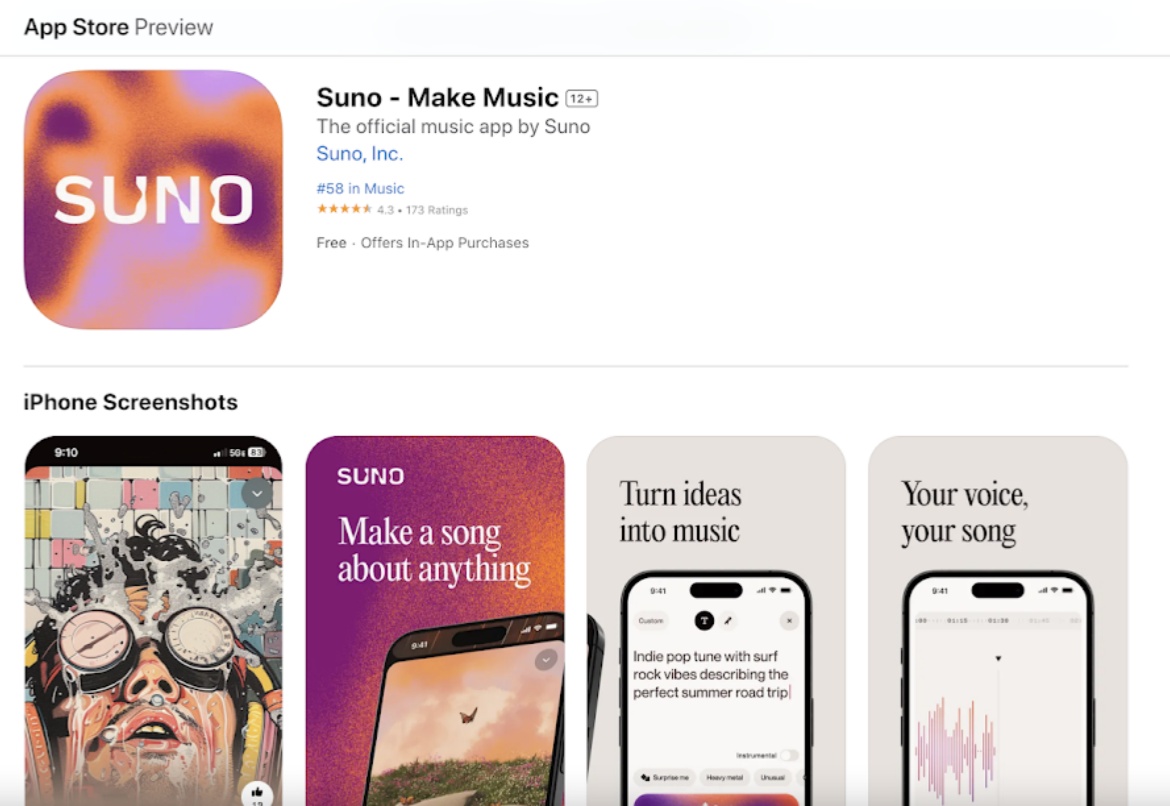
2024 年,AI 音乐生成产品 Suno 的成绩很亮眼。

Mollick:对AGI的大胆预测保持警惕
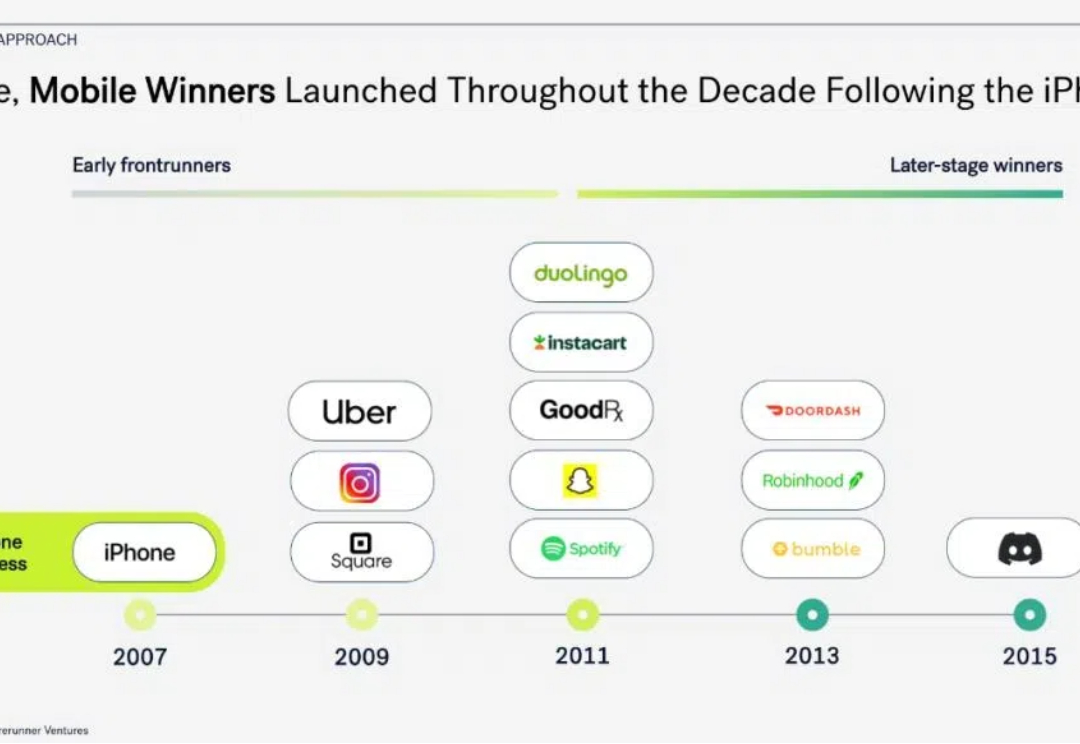
去年11月中旬,位于加州美国的知名消费VC Forerunner Ventures 宣布完成了新一期基金5亿美元规模的募集,使其管理规模来到近30亿美元。