
词元无限完成数千万元融资:字节系团队,定义全球企业级 Agent 基础设施新品类
词元无限完成数千万元融资:字节系团队,定义全球企业级 Agent 基础设施新品类一家面向企业端的 Agent 产品拿到了融资。词元无限近日宣布完成数千万元天使+轮融资,由华控基金、水木创投联合领投,厦金创新跟投。航行资本与如璞资本担任财务顾问,通商律师事务所担任独家法律顾问。
来自主题: AI资讯
9370 点击 2026-06-02 12:25
 搜索
搜索
一家面向企业端的 Agent 产品拿到了融资。词元无限近日宣布完成数千万元天使+轮融资,由华控基金、水木创投联合领投,厦金创新跟投。航行资本与如璞资本担任财务顾问,通商律师事务所担任独家法律顾问。
最近,前沿实验室 Mind Lab 密集发布了一系列关于 LoRA 与 PEFT(高效微调)的研究结果,似乎描绘出了另一条大模型「持续学习」的路径。在 Mind Lab 的视角中,PEFT 不再是对大模型全参数后训练的一种廉价平替,更是实现从 “基础模型” 向 “可持续学习智能体” 过渡的核心架构机制。

很多人没听过HeyGen。一句话概括:HeyGen公司是平行时空的Manus(视频Agent版)。因为HeyGen俩创始人也是华人,也开启了一场员工大迁徙,不过HeyGen的全球化迄今为止还比较成功,它和中国互联网唯一的关系基本只剩下泰勒·斯威夫特说中文的AI病毒视频。

2025 年 5 月份,我第一次登上了去悉尼的飞机:带着对南半球的新鲜感,以及对 AI 医疗应用的巨大憧憬;几个月后完成了对AI医疗公司Facere的投资。这也是我们在 AI 医疗这个垂直领域的第一笔投资。

80%募资金额拟用于基座大模型研发。
在具身智能训练中,“把计算全部塞进GPU”似乎成了唯一的提速密码,机器人运控并行训练的框架,IsaacLab、MuJoCoPlayground、mjlab都默认遵循这一范式,这些系统都牢牢绑定在NVIDIA生态中。

华为天才少年被具身智能企业哄抢。AI 科技评论最新获悉,前华为天才少年李一同近期已加入具身智能明星公司吉翼智能,任吉翼大模型研发中心总工程师,将主导公司在大模型与系统测试等核心板块的攻坚工作。履历方面,李一同为上海交大ACM班毕业,墨尔本大学博士,曾是华为天才少年,华为终端云语言大模型技术负责人。华为期间,李一同主要负责基于生成式大模型和人机对话方向的研究。

1492 年,哥伦布驶向大西洋深处。远洋航行当然需要速度,但真正决定船队能否抵达彼岸的,是淡水、食物、船体、桅杆和帆索能否撑过漫长风暴。改写跨洋贸易的,正是这种并不浪漫的工程逻辑。 后来,荷兰人设计出
把一件皱成一团的衣服叠好,是家务,也是机器人操作里的“硬仗”。
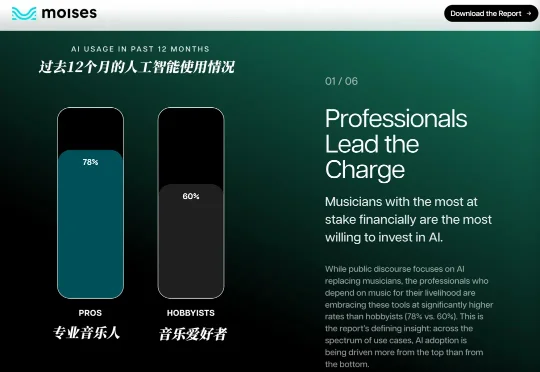
音乐产业正在经历一个新的“奥德赛时期”,变量无疑来自AI。到目前为止,专业音乐人们大都对使用AI讳莫如深,但一些报告称,AI已经在行业里广为普及。今年3月,moises和Water & Music联合发布的报告称,专业音乐人的AI使用率达到78%。