美国具身也没成熟!PI:中国公司何必总当“中国版XX”|RSS 2026
美国具身也没成熟!PI:中国公司何必总当“中国版XX”|RSS 2026“包括Physical Intelligence在内,如今的北美头部具身智能公司离成熟都还有不短的距离。整个领域,也还没出现真正的奠基性工作。”“中国真正领先的,恰恰是机器人硬件。美国同样没有成熟答案,中国公司又何必急着把自己称为‘中国版XX’?”
来自主题: AI资讯
8156 点击 2026-07-26 11:25
 搜索
搜索
“包括Physical Intelligence在内,如今的北美头部具身智能公司离成熟都还有不短的距离。整个领域,也还没出现真正的奠基性工作。”“中国真正领先的,恰恰是机器人硬件。美国同样没有成熟答案,中国公司又何必急着把自己称为‘中国版XX’?”
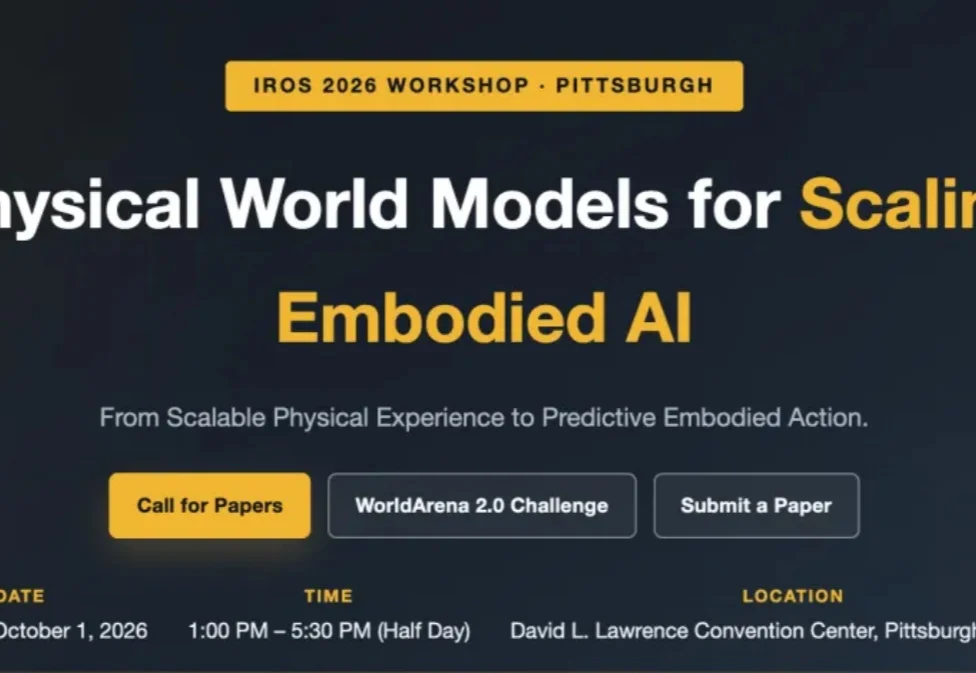
2026年10月1日,IROS 2026 Workshop——Physical World Models for Scaling Embodied AI将在美国匹兹堡举行。论文征集现已开放,8月10日截止;WorldArena 2.0 Challenge三大赛道已于7月10日开赛,总奖金$7500。
Digital AI和Physical AI之间,曾有一道难以跨越的鸿沟。

近期,字节跳动商业化GenAI中国区负责人、原AI Lab技术负责人袁泽寰确认离职,创业方向锚定世界模型赛道,聚焦Physical AI领域的基础模型研发。

近日,可信物理智能企业 Xspark AI(无界智航)完成首轮近亿元天使轮融资。本轮融资由鼎晖VGC、初心资本、SEE Fund 无限基金联合领投,深圳天使母基金、水木校友种子基金等多家财务投资机构,以及北洋海棠基金、特步家办等产业方跟投,多维资本担任融资财务顾问。资金将主要用于核心技术研发、产品迭代以及 Physical AI 的规模化落地。

北大团队雪梦未来(SnowOrigin)获龚虹嘉、陆奇及海外机构投资。公司以神经腕带、全景头环等可穿戴设备为入口,结合自研NMH(Neural Math Hybrid)AI 解码模型,试图将人类真实操作过程中的意图、姿态、发力趋势、微控制及环境上下文,转化为可用于机器人、世界模型和具身智能训练的结构化数据。

华大智造子公司涌生智能×上海人工智能实验室,联合发布两项新成果:ProtoPilot:一款由真实实验室场景驱动的自进化多智能体系统;BioLab Bench:生命科学领域首个从用户需求到设备可执行的全流程Agent评测体系。

2026年,具身智能赛道的融资热度仍在持续,但投资人的提问方式已经变了。
新时代的 Physical AI 公司,不是本体公司,也不是模型公司。

当全球具身智能行业还在争论技术路线时,一家中国公司已经率先定义并跑通了自己的答案。深度机智提出的「人类学习」路线——以人类数据为起点、动作建模为中心、机器人为 AI 而生——正在被英伟达、Physical Intelligence 等海外头部机构沿同一方向跟进。