
刚刚,宇树机器人学会新功夫!帅是真帅,就是怕它打我
刚刚,宇树机器人学会新功夫!帅是真帅,就是怕它打我练习时长一年半,宇树机器人又进化了。
来自主题: AI资讯
9221 点击 2025-10-15 12:24
 搜索
搜索
练习时长一年半,宇树机器人又进化了。

灵巧手技能+1,能帮女友拧瓶盖了!
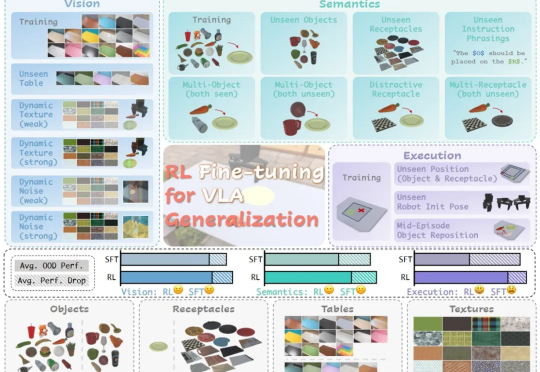
在具身智能领域,视觉 - 语言 - 动作(VLA)大模型正展现出巨大潜力,但仍面临一个关键挑战:当前主流的有监督微调(SFT)训练方式,往往让模型在遇到新环境或任务时容易出错,难以真正做到类人般的泛化
李飞飞要用ImageNet的方式,推动具身智能了。就在最近,由李飞飞团队发起、英伟达赞助(其中之一)的首届BEHAVIOR家务挑战赛正式启动。这一次,他们下定决心凝聚学术界和产业界的力量,共同向机器人做家务这一高地发起冲击。
杭州六小龙之一的云深处,率先把人形机器人户外作业能力拉满了。杭州六小龙之一的云深处,率先把人形机器人户外作业能力拉满了。甚至直接大水漫灌也没再怕的。
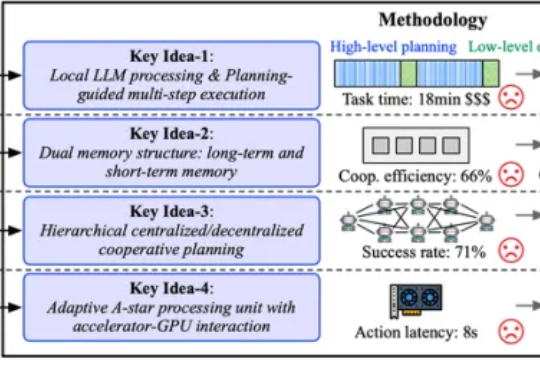
为了打破这一僵局,来自佐治亚理工学院、明尼苏达大学和哈佛大学的研究团队将目光从单纯的「成功」转向了「成功且高效」。他们推出了名为 ReCA 的集成加速框架,针对多机协作具身系统,通过软硬件协同设计跨层次优化,旨在保证不影响任务成功率的前提下,提升实时性能和系统效率,为具身智能落地奠定基础。
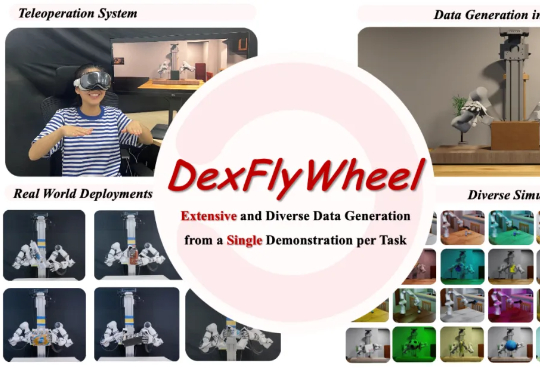
近期,北京大学、哈尔滨工业大学联合 PsiBot 灵初智能提出首个自我增强的灵巧操作数据生成框架 ——DexFlyWheel。该框架仅需单条演示即可启动任务,自动生成多样化的灵巧操作数据,旨在缓解灵巧手领域长期存在的数据稀缺问题。目前已被 NeurIPS 2025 接受为 Spotlight(入选率约 3.2%)
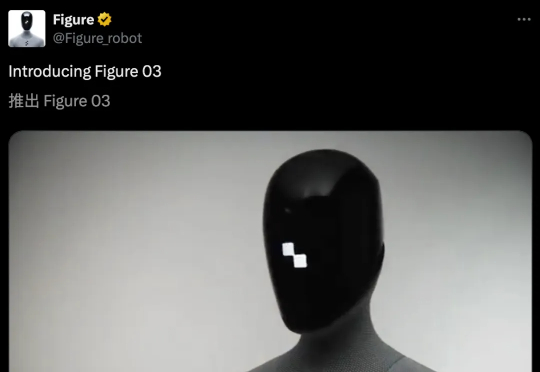
通用机器人曙光来临!今天,Figure 03正式亮相,专为Helix「大脑」量身打造,冰冷机身有了织物外覆。更值得一得的是,03手掌心配备一颗摄像头,指尖即可感知3克的力。

昨天,阿里通义千问大语言模型负责人林俊旸在社交媒体上官宣,他们在 Qwen 内部组建了一个小型机器人、具身智能团队,同时表示「多模态基础模型正转变为基础智能体,这些智能体可以利用工具和记忆通过强化学习进行长程推理,它们绝对应该从虚拟世界走向物理世界」。

你见过这样的“盲眼”机器人demo吗?这些丝滑小连招来自亚马逊机器人团队FAR(Frontier AI for Robotics)发布的首个人形机器人(足式)研究成果——OmniRetarget!