
一个月的活一周干完!英伟达世界模型训练速度飙升400%
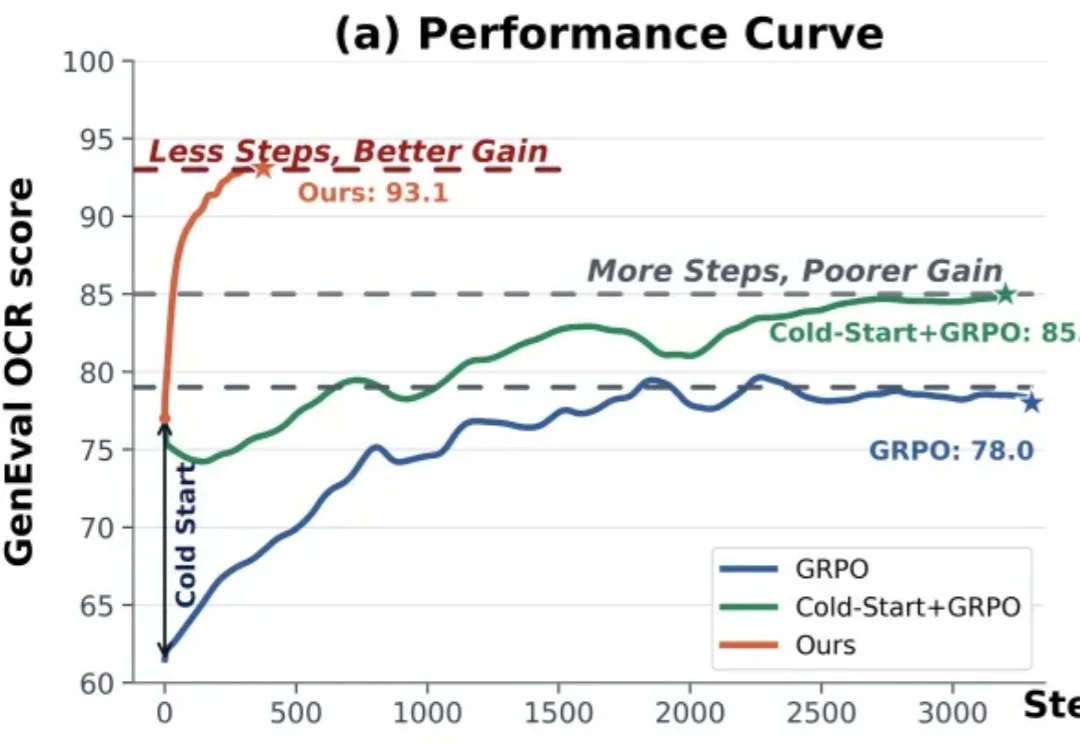
一个月的活一周干完!英伟达世界模型训练速度飙升400%英伟达世界动作模型 DreamZero 训练一次要烧 8 张 H100 整整 25 天,RLinf 从算子融合到 I/O 全链路系统级重构,把训练吞吐拉高近 4 倍——1 个月的活,1 周就能干完。
来自主题: AI技术研报
6973 点击 2026-05-26 16:04
 搜索
搜索
英伟达世界动作模型 DreamZero 训练一次要烧 8 张 H100 整整 25 天,RLinf 从算子融合到 I/O 全链路系统级重构,把训练吞吐拉高近 4 倍——1 个月的活,1 周就能干完。

造AI这件事,现在的主角变成了AI。
机器人看得见,但不一定看得准。
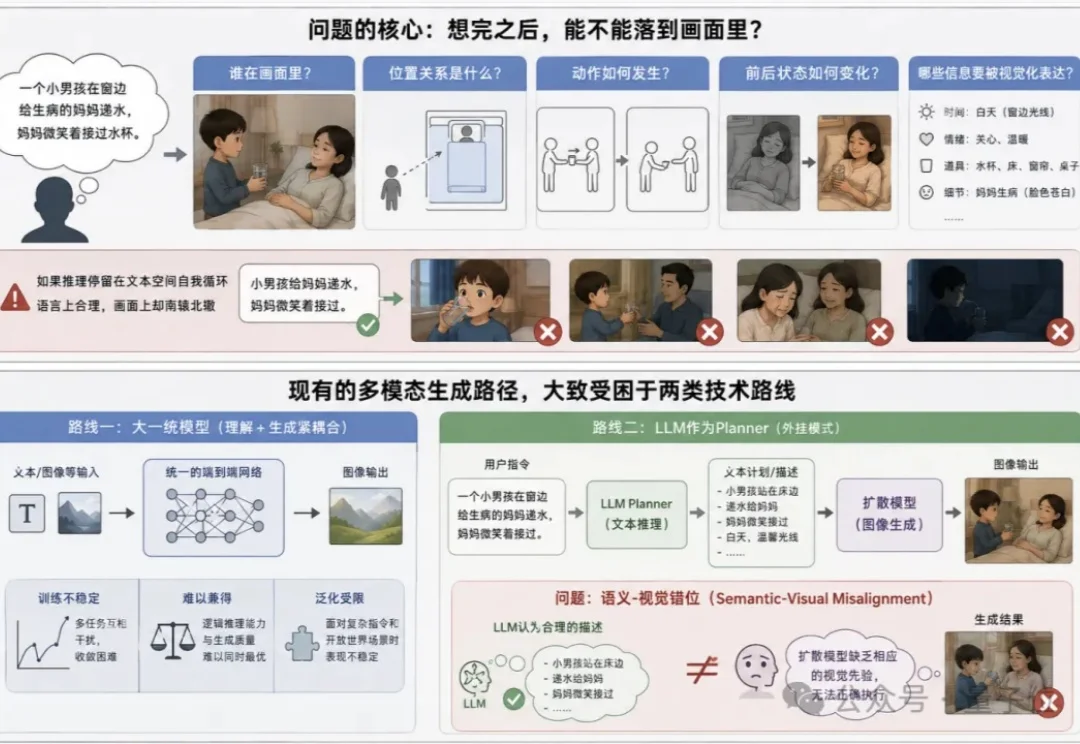
当下视觉生成正陷入一个能力错位困境—— 扩散模型的像素画质已接近完美,但一遇到需要逻辑推理的生成任务就频频翻车。
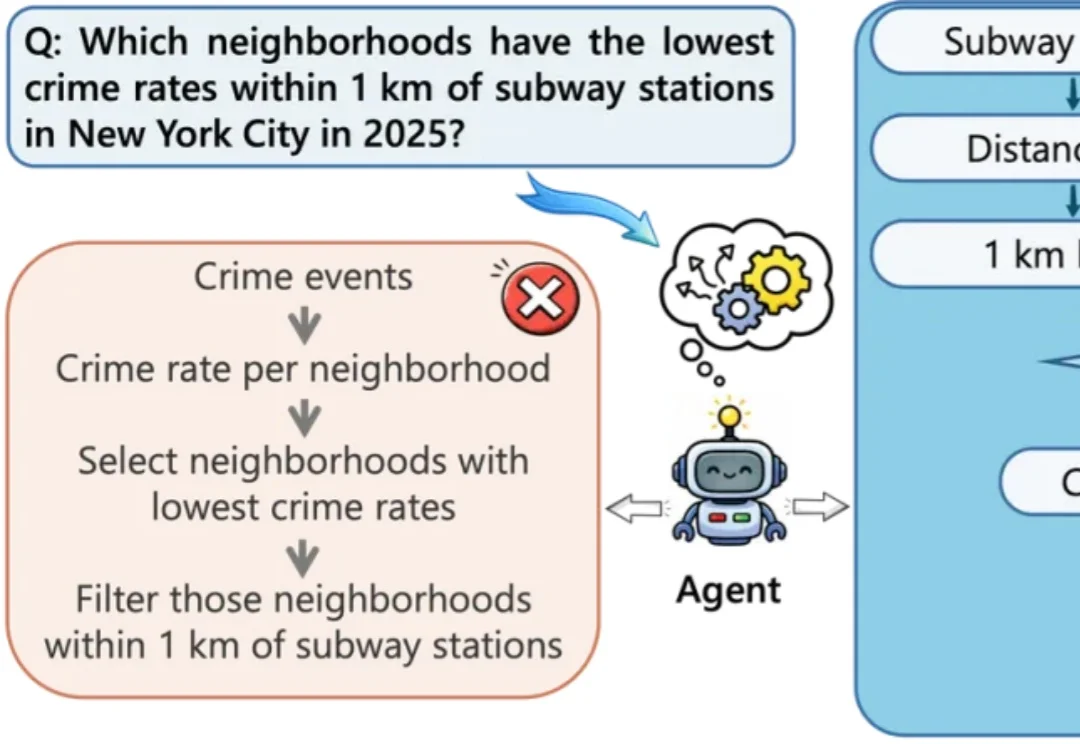
大语言模型在地图、城市、交通等空间领域的应用越来越广泛。对于这些场景来说,问题往往不只是 “查一个地点” 或 “调用一次路线 API” 就能解决的,而是需要把用户的自然语言问题组织成一段可执行、可验证的地理分析流程。
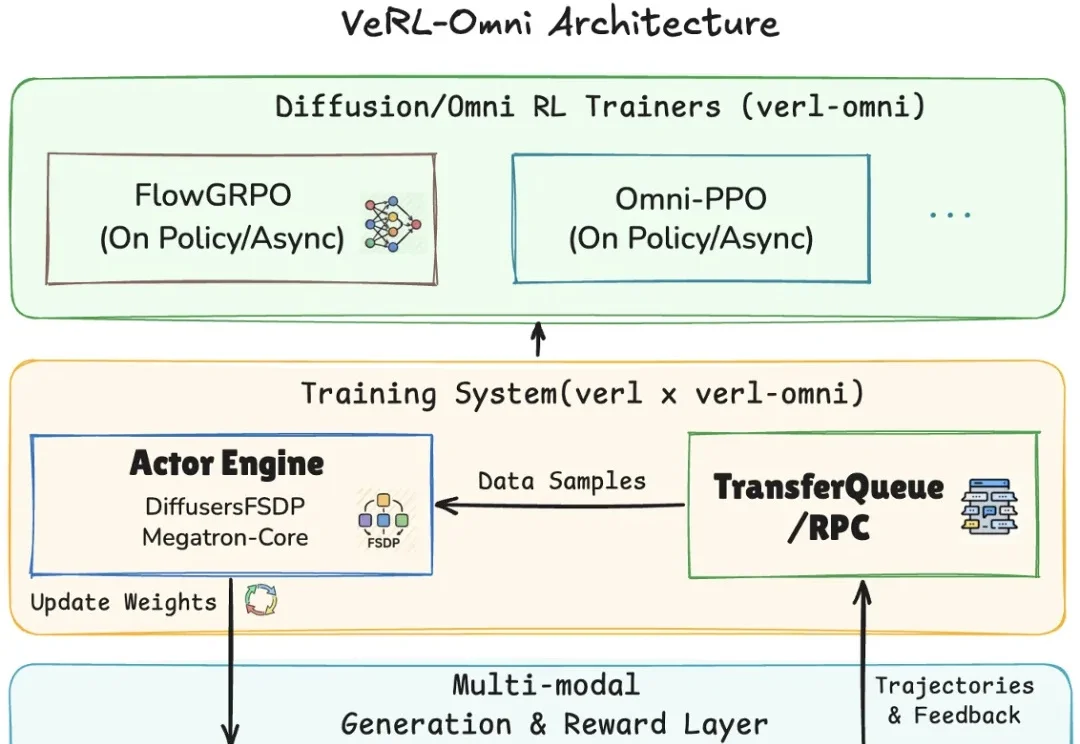
VeRL-Omni 是一个面向多模态生成模型的通用 RL 后训练框架,由 VeRL-Omni 团队在 verl 与 vllm-omni 之上构建。覆盖扩散 transformer(Qwen-Image)、混合 AR-DiT(Qwen-Omni)、统一理解 + 生成(BAGEL、HunyuanImage-3.0)等架构。
今年以来,在线策略蒸馏 OPD(On-Policy Distillation)已经逐渐成为大厂 LLM 后训练中的重要组件,例如 DeepSeek-V4,GLM5 就使用了多教师 OPD 来整合不同领域专家模型的能力,相比混合奖励强化学习收敛更快、效果更好。
具身智能(Embodied AI)正在快速从实验室走向真实世界。
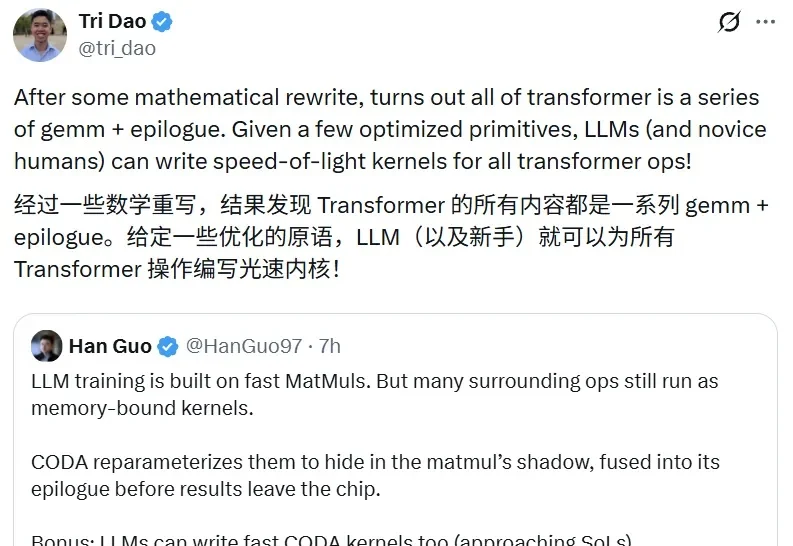
5 月 22 日,Tri Dao 在社交媒体上转发了 Han Guo 的一条推文。他还写道:「经过一些数学重写,结果发现 Transformer 的所有内容都是一系列 GEMM + epilogue(矩阵乘法加尾声)。给定一些优化的原语,LLM(以及新手)就可以为所有 Transformer 操作编写光速内核!」
当前,测试时扩展范式普遍致力于增加推理长度。然而,已有研究表明,随着推理长度的持续增长,以垂直扩展为核心的计算范式容易陷入探索僵化等问题。因此,从另一维度拓展推理的宽度显得尤为重要。K2.5、Step3-VL 和 LongCat-Flash-Thinking 等模型已在推理宽度方面开展了有益的探索。